
图1 煤矸分拣机器人模型
Fig.1 Model of coal and gangue sorting robot
煤炭是我国最主要的一次能源,占我国一次能源消费总量60%以上。国家对煤炭开发利用的转型升级越来越重视,《煤炭工业发展“十三五”规划》明确提出,国家将煤炭清洁高效开发利用作为能源转型发展的立足点和首要任务[1]。高煤炭入选率是提高煤炭利用率和减少污染排放的有效指标,由于受到资源、能源和技术条件的限制,我国在主要产煤国中处于较低水平。现阶段国内传统煤矸分离方法主要有人工选矸和机械分选[2]。
目前,人工选矸主要存在于机械分选前去除大块矸石和锚杆等异物的环节。这种方法效率低,工人劳动强度大,工作环境恶劣;另外,部分中小煤矿由于成本问题,仍然采用人工选矸。
跳汰选煤作为煤炭分选中机械分选的主要工艺之一,具有工艺流程简单、设备操作维修方便,且有一定的分选精度等优点,而且跳汰选煤入料粒度范围宽,对煤质的适应性也比较强。然而跳汰选煤设备体积较大,基建投资比较高,只适用于大型选煤厂,且跳汰选煤分选精度比较低,不适用于分选精度高的场合。跳汰选煤的过程无法完全实现自动化,并且单机分选处理的效率低,严重影响了选煤的效率。此外,跳汰选煤因为选用水或空气为介质,会造成一定程度的水污染和大气污染[3-6]。
重介质选煤作为目前重力选煤方法中效率最高的一种,其工艺流程也变得越来越简单化,而且具有设备体积小巧、处理量大、本身无运动部件、产品受原煤性质波动小等特点,尤其对难选煤、极难选煤以及细粒较多的氧化煤、高硫煤的分选和脱硫效果显著。但重介质选煤需要消耗大量的重介质,从而造成了资源的浪费,增加了分选经济成本,且对环境产生了大量污染[7-12]。一般在生产过程中,重介质利用率较低,频繁加介的过程中会使介质密度稳定性变差,从而导致产品质量不稳定,造成严重的经济损失。
国内外在干法选煤上也有很多研究。19世纪60年代,风力选煤在美国、前苏联等国被广泛应用[13],但由于其分选精度低、污染大,应用较少。进入20世纪六七十年代后, ROWE P N等进行了流化床选煤的基础理论和试验研究,加拿大的BECCKMANS J M等研制出了链动逆流流化床半工业性选煤装置。1994年由中国矿业大学完成的50 t/h空气重介质流化床干法分选示范项目通过了国家技术鉴定和工程验收[14]。但空气重介质流化床干法选煤技术对于高密度煤炭排矸应用有限,分选精度不高。
近些年中国矿业大学提出了一种冲击式破碎分选技术,利用煤和矸石的硬度差异,使冲击后混合的物料中硬度大的矸石基本保持原始的块度,而硬度小的煤块破碎,通过筛板将煤和矸石分离[15-16]。然而这种方法下生产的煤的体积较小,影响了煤矿生产效益。随着我国对原煤入选率不断提出更高的要求,促使煤炭企业加快选煤厂的建设。针对西北部产煤地区水资源的缺乏,初期建设资金和运营成本过高的问题,笔者设计一种成本低、耗水少的新型高效、智能的煤矸分选方法,以实现煤和矸石的快速分选。
煤矸分拣机器人是一种新的选煤工艺,降低分选过程中的能耗、介耗和污染物的排放。针对国内煤矿的煤矸分选现状和大多数煤矿选煤厂的工况,煤矸分拣机器人要求适应选煤厂狭小的空间和速度较快的手拣矸输送带,故需要减少整体煤和矸石分离的响应时间,提高分离的工作效率。因此提出一种基于煤矸图像识别和定位方法,并采用多机械臂协同煤矸分拣策略的煤矸分拣机器人,如图1所示,其主要由拣矸带式输送机、回收带式输送机、视觉识别系统、多臂分拣模块、控制系统等组成。
图1 煤矸分拣机器人模型
Fig.1 Model of coal and gangue sorting robot
煤和矸石进入视觉识别系统,采集煤和矸石的图像后,通过图像识别的方法,对多个运动目标进行高效识别和三维定位。针对已经识别与定位的矸石,进入多臂分拣模块,多个分拣机械手稳定、快速地拣取矸石,实现煤矸分拣机器人的智能化分拣。煤矸分拣机器人的整体流程如图2所示。
煤矸分拣机器人的视觉识别系统主要有识别和定位作用。现有机械分选中的识别方法如机械振动、γ射线、红外反射等需要较大的设备成本,其中射线还会对作业人员的健康造成威胁[18-20]。因此提出一种基于深度学习的煤矸图像识别方法。

图2 煤矸分拣机器人的整体工作流程
Fig.2 Whole working process of coal and gangue sorting robot
视觉识别系统架置于多臂分拣模块前方,实时采集煤和矸石流的图像数据,通过对图像的预处理,利用卷积神经网络模型,自动提取煤矸图像特征,最后给出准确的识别信息。为了训练出识别效果好的网络模型,需对网络模型提供大量不同的煤矸图像数据,让其自动学习图像中的特征,确定模型参数,优化模型,煤矸目标识别方法如图3所示。
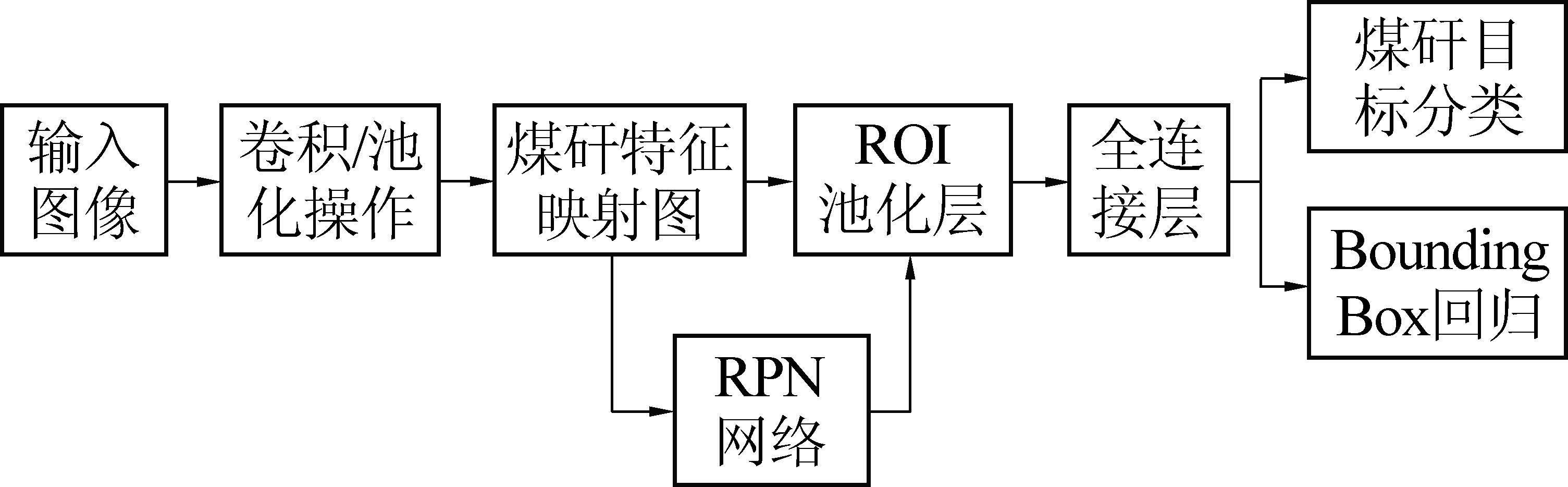
图3 煤矸目标识别方法
Fig.3 Coal-gangue target identification method
为保证神经网络进行正常训练并获得较好的训练结果,需对采集来的图像做筛选、尺寸归一化、标注等预处理,通过卷积神经网络中卷积层与池化层的结合作用,自动提取煤矸图像特征,得到特征映射图,该映射图再经过RPN网络提取煤或矸石的候选区域,最后输出图像中煤或矸石目标的分类。
煤矸识别网络学习时损失率的对比情况如图4所示。网络学习时,煤和矸石目标识别与定位网络的训练损失率和测试损失率不断下降。多次迭代后损失率趋于收敛,表明煤和矸石识别的网络模型最终可以拟合出样本的特征。
通过对不同煤矸混合样本进行试验,得到各类样本的识别结果。由表1可以看出,笔者设计的煤与矸石目标识别与定位网络取得了较好的效果。由于不同煤种的表面色泽和质地的不同,其识别效果也有差异,煤矸目标识别与定位的综合准确率可达76.92%,完成时间为509 ms。
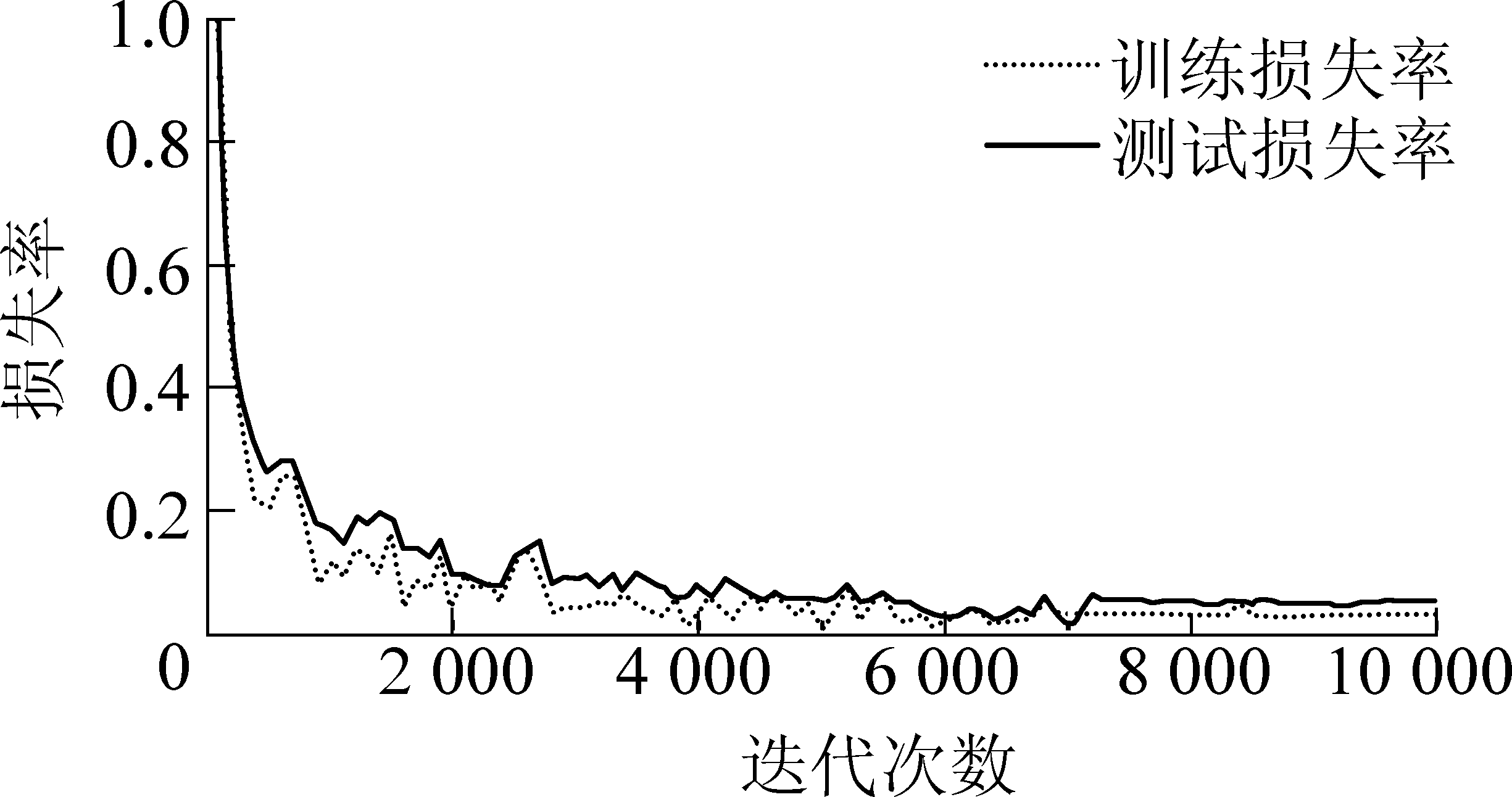
图4 煤矸识别网络学习时损失率曲线对比
Fig.4 Loss rates curves comparison in network learning for coal and gangue recognition
表1 不同煤矸混合样本的矸石目标识别效果
Table 1 Effect of identifying gangue targets in differentmixed samples of coal and gangue
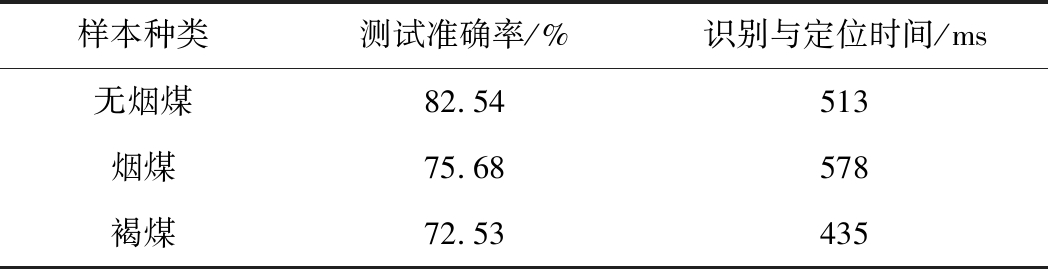
样本种类测试准确率/%识别与定位时间/ms无烟煤82.54513烟煤75.68578褐煤72.53435
煤矸目标识别与目标定位效果可视化结果如图5所示,图中矩形区域即目标定位区域,图5中数字表示该区域目标识别概率。

图5 煤矸石目标识别与目标定位效果可视化示例
Fig.5 Examples of coal and gangue target recognition and target positioning effect visualization
煤矸分拣机器人采用多臂协同拣取的方式进行分离,前提是需要获取矸石的三维信息。机器人采用机器视觉技术中的双目立体视觉技术对煤矸进行定位。煤矸混合流进入视觉识别系统后通过煤矸图像识别方法,确定分拣目标。通过对矸石图像中心识别和双目视觉系统的立体标定,对2个相机拍摄的不同图像中同一目标的成像差异进行分析,获取矸石在图像中的相对坐标和深度信息,根据坐标转换,获得拣取目标的绝对三维动态信息。最后对三维信息进行误差分析与误差补偿,将最终结果输送给控制器,控制机械手对矸石的抓取。
为了准确地获取矸石的三维动态信息,笔者根据相机的成像原理,将相机所获取的矸石图像坐标转化到机器人所在的世界坐标系中。图像中所获取的矸石像素坐标通过伸缩和平移变换,获得图像物理坐标。根据相机坐标系和图像坐标系的透视投影关系,转换到相机坐标系中的坐标。最后根据相机光心的位姿,将相机坐标系中的矸石坐标转换到机器人坐标系,即获取矸石的绝对坐标。
选煤厂的工作空间较小,粉尘较大,对于抓取装置的大小和方式有极大的限制。常见的传送带两侧放置的多关节多自由度工业机械手需要较大的放置空间和拣取空间。空气中的粉尘对多关节的机械手臂影响较大,增加了机械臂协同分拣模块的维护保养成本。为此,提出了采用桁架式三自由度机械滑台作为机械手臂所依附的移动支架,采用两爪的机械手进行夹持,并将矸石拣取到回收带式输送机。多臂分拣模块和机械手模型如图6所示。

图6 多臂分拣模块和机械手模型
Fig.6 Dobby sorting module and manipulator model
为了提高煤矸分拣机器人的拣矸效率,机器人的机械臂以追击方式快速逼近矸石,并采用随动抓取的方式来减小动态目标抓取时惯性力的影响。由于矸石的形状不规则,机械手采用两爪的夹持方式,具有灵活性、实用性的特点。
多臂分拣模块架置于拣矸带式输送机上方,不但减少抓取分离机构占地面积大的问题,而且不影响煤矸石流通过整个分拣模块。为了避免空气中的煤灰影响滑轨的移动精度,增加移动时的摩擦阻力,滑轨轨道需用防尘罩进行防尘处理;同时在选煤厂工作还需进行防爆处理,信号线及电源线埋入滑轨内部;设置温度检测装置,实时监测工作温度的情况,使机械装置在合适的工作环境下平稳运行,延长产品的使用寿命,降低产品的维护成本。
为了实现矸石的快速分离,需对煤矸分拣机器人的动作进行优化。由于拣取目标为动态,普通的定点拣取易产生碰撞。分拣模块中的机械手在其合理的工作区间内快速逼近矸石,并加速至与拣矸带式输送机速度一致,机械手向下探取并跟随拣矸带式输送机抓取矸石,最后减速将矸石放置于回收带式输送机进行回收。单个机械手分拣模块完成一次动作后向前反馈,以准备再次抓取。这种分拣动作不但减少了惯性力的影响,同时避免了在抓取过程中因碰撞改变煤和矸石的位置,造成下次位置偏差。煤和矸石在带式输送机上行进过程中的排布情况可分为3种,如图7所示。
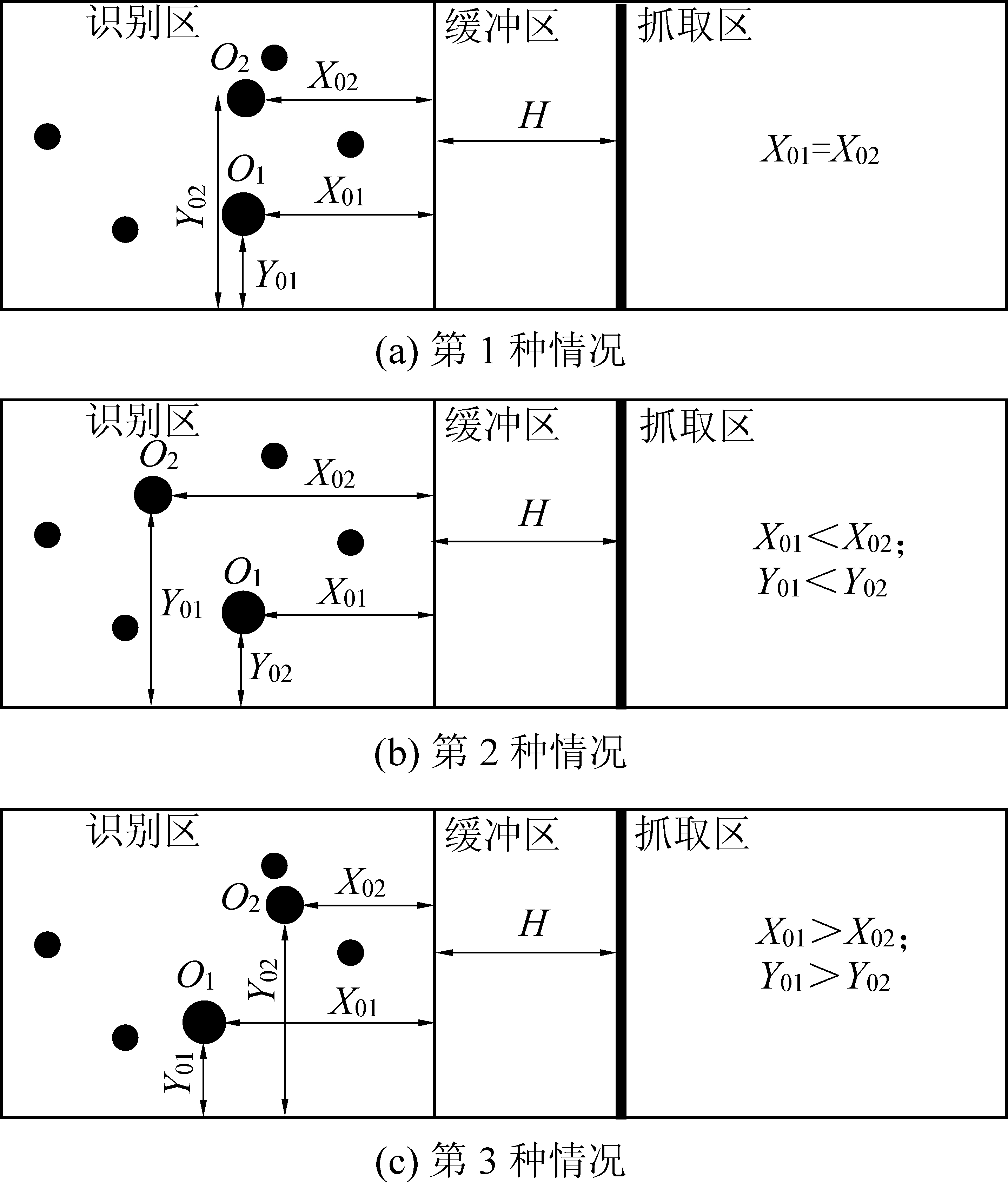
X01、X02、Y01、Y02分别为O1、O2点的模纵坐标值;H为缓冲区宽度
图7 矸石在识别区的3种情况
Fig.7 Three cases of gangue in the identification area
通过对3种情况下机械臂实际分拣运动的规划,提出双臂协同分拣方案。本节简单叙述了双臂分拣策略,并作出了策略规划,如图8所示。
煤矸分拣机器人试验平台如图9所示。由于各个煤矿含矸率不同,需合理安排多个分拣模块协同工作,来提高拣矸效率,降低漏检率。针对煤与矸石复杂且动态变化的特性,结合矸石识别系统,获取矸石标定下动态信息,确定矸石位置、尺寸、运动速度等信息,结合多个机械手分拣模块,研究多动态目标多机械臂的协同煤矸分拣策略。多机械臂在合理的工作区间内实现合理的运动策略规划,为高效、准确完成煤与矸石分拣任务提供可靠的控制策略与方法。

图8 双臂分拣策略流程
Fig.8 Two-arm sorting strategy process

图9 煤矸分拣机器人试验平台
Fig.9 Experimental platform for coal-gangue sorting robot
1)煤矸分拣机器人将机器视觉技术、机器人技术和深度学习技术结合,实现了一种井上的煤矸分离方法,其设备成本较低,分拣效率较高,并且满足绿色开采的要求,同时改善了煤矿工作者工作环境。
2)采用深度学习的煤矸图像识别方法能够有效地将煤矸进行分离,同时双目视觉能够定位准确,为机械手抓取提供有效信息。
3)煤矸分离技术未来的发展方向是实现井下分离,分拣后直接进行回填,但其所需的防爆防尘的要求更高,是未来研究重点之一。
[1] 佚 名.《中国煤炭工业改革发展年度报告》(2016年度)发布[J].中国煤炭,2017,43(2):10.
ANON.Annual report on the reform and development of China’s coal industry(2016)[J].China Coal,2017,43(2):10.
[2] 卢前明,韩红强,张瑞林,等.三软煤层改造回风巷过断层技术研究[J].煤炭科学技术,2017,45(12):64-69.
LU Qianming,HAN Hongqiang,ZHANG Ruilin,et al.Study on passing through fault technology of reconstructed air return gateway in soft roof and soft floor and soft seam[J].Coal Science and Technology,2017,45(12):64-69.
[3] 张 博,刘爱辉.半直接浮选工艺的研究与应用效果分析[J].选煤技术,2017(4):19-22,26.
ZHANG Bo,LIU Aihui.Study of the semi-direct flotation process and analysis of its operating performance[J].Coal Preparation Technology,2017(4):19-22,26.
[4] 沈国浪,李占福,童 昕,等. 基于DEM的振动筛振动参数对分层质量的影响[J].煤炭科学技术,2017,45(5):217-222.
SHEN Guolang,LI Zhanfu,TONG Xin,et al.Influence of vibration parameters of vibration screen on quality of stratification based on DEM[J].Coal Science and Technology,2017,45(5):217-222.
[5] 缪协兴,张吉雄.井下煤矸分离与综合机械化固体充填采煤技术[J].煤炭学报,2014,39(8):1424-1433.
MIAO Xiexing,ZHANG Jixiong.Key technologies of integration of coal mining-gangue washing-backfilling and coal mining[J].Journal of China Coal Society,2014,39(8):1424-1433.
[6] 张秀梅,郭 德,李志强.无压给料三产品重介质旋流器结构参数的计算[J].煤炭科学技术,2017,45(11):211-214,179.
ZHANG Xiumei,GUO De,LI Zhiqiang.Calculation of structural parameters of none-pressure three-product dense medium cyclone[J].Coal Science and Technology,2017,45(11):211-214,179
[7] 董志勇,王然风,樊民强,等.重介分选过程分流自动控制系统设计[J].工矿自动化,2017,43(7):23-27.
DONG Zhiyong,WANG Ranfeng,FAN Minqiang,et al.Design of automatic shunt control system in dense-medium separation process[J].Industry and Mine Automation,2017,43(7):23-27.
[8] 韦鲁滨,孟丽诚,程相锋,等.重介质悬浮液流变特性研究[J].煤炭学报,2016,41(4):992-996.
WEI Lubin,MENG Licheng,CHENG Xiangfeng,et al.Research on rheological properties of dense-medium suspension[J].Journal of China Coal Society,2016,41(4):992-996.
[9] 王占山,李莹莹.重介质选煤厂介耗影响因素分析[J].煤炭加工与综合利用,2016(1):44-45.
WANG Zhanshan,LI Yingying.Analysis on influencing factors of medium consumption in heavy media coal preparation plant[J].Coal Processing & Comprehensive Utilization,2016(1):44-45.
[10] 张秀梅,郭 德,王 露,等.煤泥自载体浮选[J].煤炭学报,2018,43(4):1127-1133.
ZHANG Xiumei,GUO De,WANG Lu,et al.Autogenous-carrier flotation of coal slime[J].Journal of China Coal Society,2018,43(4):1127-1133.
[11] 郭学亮.风力干法选煤技术的现状及在新疆选煤市场中的应用前景[J].煤炭技术,2015,34(8):292-294.
GUO Xueliang.Actuality of pneumatic dry coal preparation technology an application prospect in Xinjiang coal Separation Market[J].Coal Technology,2015,34(8):292-294.
[12] 李 敏,王 安,唐利刚,等.气固流态化干法选煤技术现状[J].煤炭加工与综合利用,2013(4):25-29.
LI Ming,WANG An,TANG Ligang,et al.Current status of coal preparation technology by gas-solid fluidized dry method[J].Coal Processing & Comprehensive Utilization,2013(4):25-29.
[13] YANG D,LI J,ZHENG K,et al.Impact-crush separation characteristics of coal and gangue[J].International Journal of Coal Preparation & Utilization,2016(2):209-216.
[14] 吕永标,赵建伟,曹飞龙.基于复合卷积神经网络的图像去噪算法[J].模式识别与人工智能,2017,30(2):97-105.
LYU Yongbiao,ZHAO Jianwei,CAO Feilong.Image denoising algorithm based on composite convoluntional neural network[J].Pattern Recognition and Artificial Intelligence,2017,30(2):97-105.
[15] ZHANG N,LIU C.Radiation characteristics of natural gamma-ray from coal and gangue for recognition in top coal caving[J].Scientific Reports,2018,8(1):209-215.

移动扫码阅读